It’s been just over two months since Google opened the floodgates holding the general public back from the .ing generic top level domain (TLD). The launch was accompanied by commentary that newer TLDs were just a cash grab and ripe for squatting, phishing and other less-than-savoury practices.
I was curious about these claims, so I spent some time scraping data from newly registered domains and performed some superficial analysis to see what they were being used for.
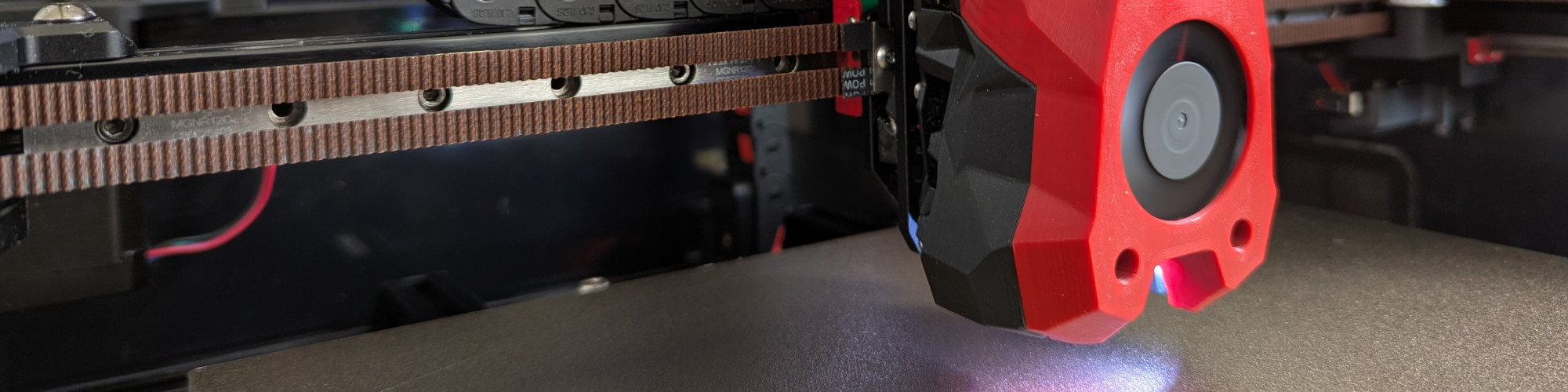
My usual tinkering and project backlog has been set aside for the past few months. Instead, my attention was diverted to the assembly of a Voron 2.4. It is the third 3D printer I’ve owned, and I find myself reflecting on how things have progressed, and how much of that progress has been driven by hobbyists and the open source community.
Four weeks ago, I was feeling guilty for spending so much time inside playing Tears of the Kingdom, so I took it on myself to plan something for the National Day long weekend. That something turned out to be a hike from the westernmost point to the easternmost point in Luxembourg.
If you’ve ever delved into the world of high voltage power supply circuitry, you will have come across a classic flyback driver design attributed to Vladimiro Mazzilli. It’s simple, relatively robust and scalable to very high power levels.
For all its elegance, there has been one part of the design that I’ve always considered brutish — the gate drive circuitry. The feedback diodes, the zener clamps and the low value pull-up resistors are slow and inefficient. In a recent ElectroBOOM video, Medhi made a comment to this effect and asked the community if there were any solutions. Fortunately, there are some very basic modifications that can be made which massively improve the gate drive of this common circuit.
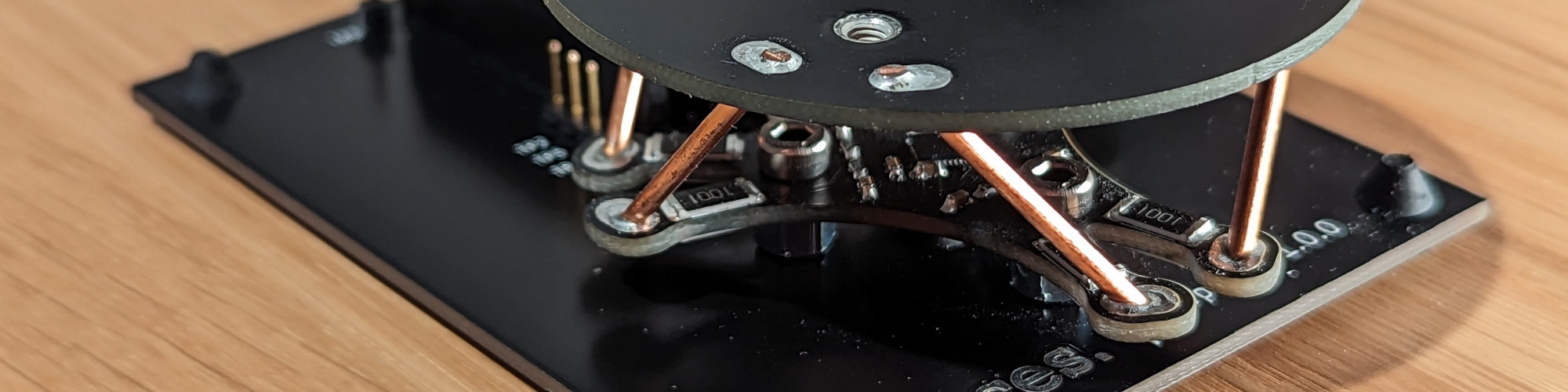
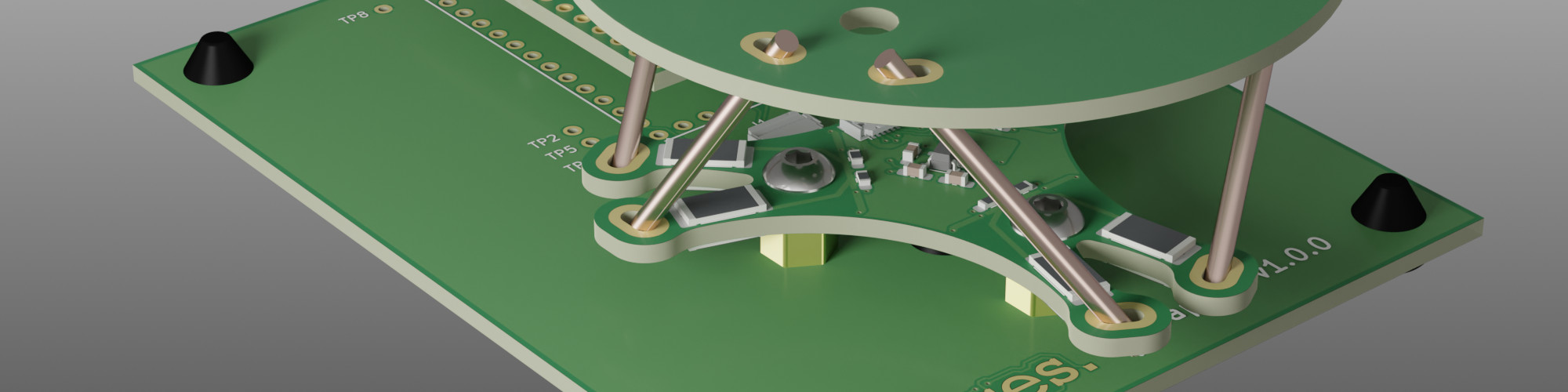
As explained in Part One, I’m attempting to build a tactile input device using a force sensor with six degrees of freedom. At the end of the previous chapter, I was waiting on prototype parts to test a proof of concept device based on a Stewart platform with six force sensors integrated into the printed circuit assembly itself.
Well, the parts arrived, and thus began the first prototype iteration — assemble, test, learn and improve.
Tempeh is delicious. For those that are unaware, it is a food from Indonesia consisting of soybeans fermented by Rhizopus oligosporus fungus. The resulting product is a firm, white slab of beans bound together with white mycelium. It has a nutty, savoury, mushroom-like flavour that works well as a meat substitute in many dishes.
Recently I’ve been experimenting with the propagation of tempeh mould. I’ve developed a simple technique to create a spore suspension that produces a strong, active, fast-spreading fungal colony for making fresh tempeh.
In 1983, a student at the University of Sydney named John Hilton started development of a new type of input device for computer aided design (CAD) software. His research led to a technology that allowed intuitive control of virtual objects with a full six degrees of freedom (6DOF). To achieve this, the user would push, pull and twist a small ball, and these manipulations would be applied to the virtual object.
Since then, there have been many embodiments of the concept in a multitude of devices. Collectively they’ve been coined Spacemice, and I want to design and build one.
Australians spend a lot of time cooking outdoors. Public parks have barbeques for anyone to use, sausage sizzles are a ubiquitous way to fundraise money for local community groups, and practically every household has some form of cooking appliance in the backyard or on the balcony. Open fires, wok burners, barbeques, tandoors, pizza ovens, satay grills, rotisseries, seafood boilers, smoke houses and pit ovens are used across the country.
I’ve been characterising a high performance gyroscope at work recently by measuring the Allan variance of its rate output. From the Allan variance plot, it’s possible to visualise and calculate the various sources of noise that cause error, including quantisation noise, angular random walk, bias instability and rate random walk. Each of these noise sources is caused by a different physical process and can be differentiated by its colour. What is noise colour, you ask?
I’ve been building the foundations for this blog over the past few weeks and it seems fitting that the very first post should cover some of my experiences. My goals for the blog were for it to be simple, fast and accessible. I wanted to build it from scratch myself using modern technologies, and I wanted it to be easy to update and manage.